
Autonomous Wheelchair
Guide: Dr. Madhav Krishna RRC, IIIT-Hyderabad
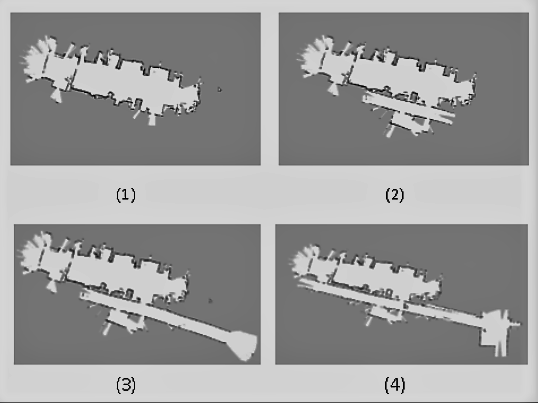
Description: Enabling the wheelchair with automatic localization, navigation in known/ unknown map, object detection and recognition to help patients in hospital. This project contains control, environment recognition, route planning, obstacle avoidance, object recognition and object searching in map. This technology is appropriate for people who have lost mobility due to brain injury or the loss of limbs, but who retain speech.Video Link





{kind=link}